Mechanical Design
Per the requirements of this project, all sumo robots had to be manufactured using rapid prototyping techniques such as laser cutting, 3D printing, and waterjet cutting. To comply with this requirement and meet our manufacturing deadline, our team decided to use laser cut acrylic panels for the body of the robot. Acrylic was selected because it is easy to laser cut, durable, rigid, and cheap. The four panels of the robot body were modeled in Fusion 360 to visualize the design and ensure that it met the maximum space envelope specifications. This also gave us an accurate estimate of the frame’s overall weight, which was entered into our bill of materials for calculating the final maximum weight prior to ordering parts and manufacturing the design.
Acylic Frame
With the geometry modeled, the sketches used to drive the 3D modeled parts were then exported as DXF files for use on the laser cutter in the Mustang ‘60 machine shop. These cut panels were adhered together using JB Weld plastic epoxy. Epoxy proved to be a poor choice of adhesive, as it did not bond to the surfaces of the laser cut acrylic panels reliably. Several panel separations occurred between the baseplate and sidewalls of the robot body throughout our testing process. These issues were easily remedied using superglue and some 3D printed corner brackets, as we will discuss in more detail later in this report. Starting with superglue or proper acrylic welding cement would have been a better initial choice for our adhesive.
Acrylic presented the additional challenge of limiting the placement of fasteners and the type of fastener heads that our team could use to mount hardware to the robot body. Countersink fasteners could not be used due to the expansive force they place on the material they fasten, which is not conducive to reliable fastening of brittle acrylic panels. This limited us to higher-profile fastener heads such as button and hex, which caused issues with vehicle clearance when used to secure our motor mounts through the baseplate. These screw head profiles were too tall, causing the sumo bot to bottom out and reducing our traction. To address this issue, I used a manual mill to remove 3/16" from the lower standoffs of the motor mounts. However, when our robot pushed under another during testing, we were still bottoming out and losing traction to the scraping screw heads. We eventually had to rush-order low profile hex head screws to mount the motor mounts to the baseplate.
Bulldozer Blade
The front side of the robot was designed to be a thin piece of steel cut into a rectangle and bent at the lower edge to form a bulldozer-style pushing blade. A hole was then cut in this component to accommodate a time-of-flight sensor. Very few changes were made to this design from the first iteration; however, we were unable to manufacture this part using a waterjet, as it was not available until one day before the mechanical design deadline. To manufacture this component in time, our team simply used a manual shear to cut the rough shape of the blade, bent the lower edge in a brake-press, and filed the edges and corners to the proper final shape and dullness.
Our team needed the dozer blade and the cover of the robot to be removeable to maintain access to the internals of the robot. This was achieved by mounting both the blade and cover with fasteners rather than adhesives. We considered using inserts on our relatively thin acrylic, but ultimately our team tapped holes directly into the acrylic sidewalls for fastening of these removeable components. This decision also contributed to the sidewall separation from the baseplate during testing but was also resolved by the addition of the 3D printed components used to compensate for our poor adhesive selection. Mounting of the dozer blade in this later iteration of the design was done by heat setting M3 screw inserts into these 3D components to remove load from the sidewalls and prevent further separation of the frame panels.
Selecting Drive Components
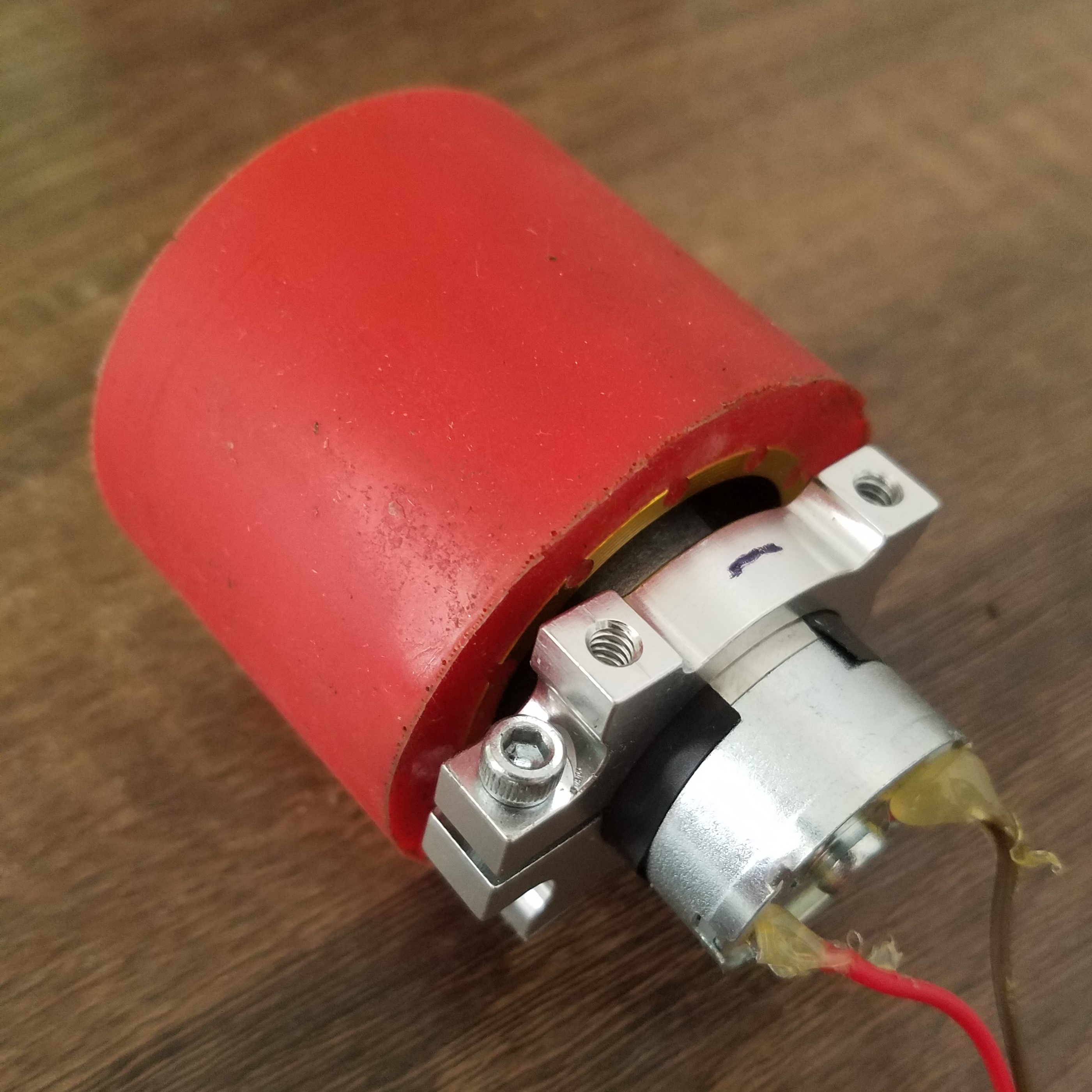
Throughout the mechanical design of this project, wheel and motor selection were critical topics of discussion as these components would determine the power transmission capabilities of our design. Our team decided to use Shore A20 polyurethane wheels purchased from FingerTech Robotics due to this material’s superior coefficient of static friction. The manufacturer claims that their polyurethane wheels provide greater friction than silicone wheels commonly used in robot sumo, µ = 1.75 for Shore A20 versus µ = 1.30 for silicone (on MDF particle board). Using this material coefficient of friction and assuming the maximum robot weight of 1500g, we calculated hat the maximum static friction force these wheels can support is 92.61 oz-in.

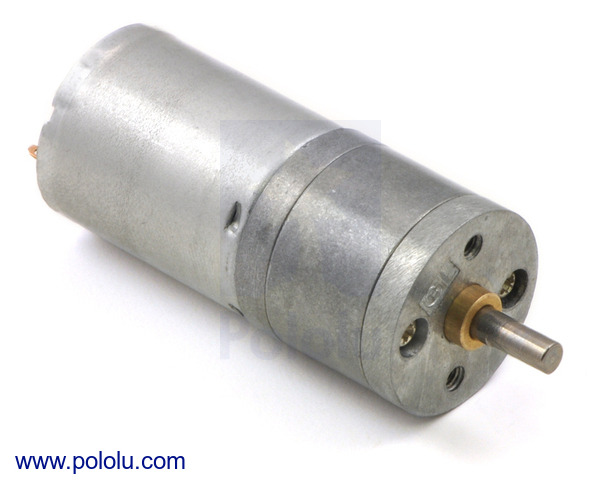
With this traction limit in mind, our team researched motors with a projected stall torque of 100oz-in, while considering the other motor specifications of 25mm maximum can diameter and maximum operating power output of 12.5W per motor. This ensured plenty of overhead to prevent our motors from approaching stall conditions assuming a maximum possible load of 93oz-in based on the traction limit of the wheels distributed among four motors. These constraints narrowed down our options to the 12V, 20.4:1 gearmotors from Pololu. Many other teams in our competition ended up independently selecting the same motors, some with slightly lower and higher gear ratios. This further solidified our confidence in the selection of these motors. The wheels from FingerTech Robotics had some issues with misaligned wheel hubs due to inadequate quality control by the manufacturer, but this problem was self-corrected as the motor shafts wore in the wheel hubs during testing. This wear did create a need for us to replace the set screws in these wheels with longer screws to prevent them from falling off when the robot made many consecutive turns. With these modifications, the wheels performed well in the competition. Our selected motors also performed well and caused no issues at any stage of our testing.
Drive System Mounts
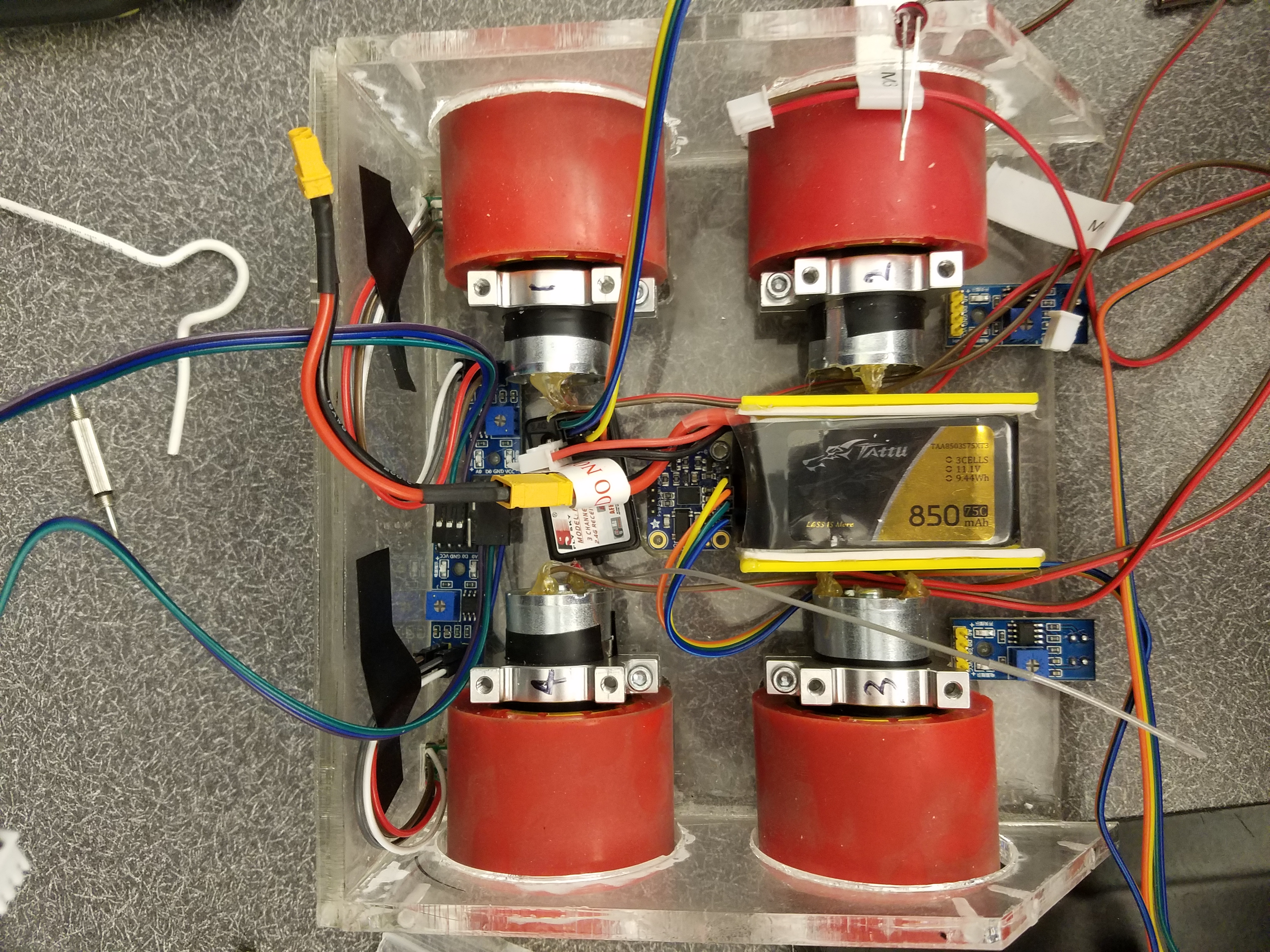
Finally, a method of mounting our motors needed to be selected. While we would have liked to 3D print custom motor mounts to provide additional frame support near the corners of the robot body, we did not have access to a 3D printer until quite late in the project. To avoid missing our deadline, we selected 25mm clamping motor mounts made from aluminum. These mounts were ideal for this type of motor but did require some minor modifications for our project. First, they did not provide sufficient dropout for our wheels, which meant we needed to reduce the height of the mount between the motor itself and the baseplate of the robot body. This was done by fastening all four mounts to a piece of Delrin which had been turned to 25mm diameter on a manual lathe. With all four mounts fastened as a common part, the lower-side standoffs could then be milled down by 1/8 inch to provide adequate wheel dropout and prevent the motor mount fasteners’ heads from dragging on the ground. Additionally, these mounts did not provide much stability against bending moments about the horizontal axis perpendicular to the motor axis. To support such moments, our team decided to incorporate our PCB as a structural component by mounting it to the top of these motor mounts. This proved inconvenient to our later wire routing efforts but did achieve the goal of supporting the motor mounts against bending moments.

The final drive system for our sumo bot consists of four independent drive modules, enabling various ways to define skid-steering PWM signals for the whole system despite having four relatively wide wheels.
Results
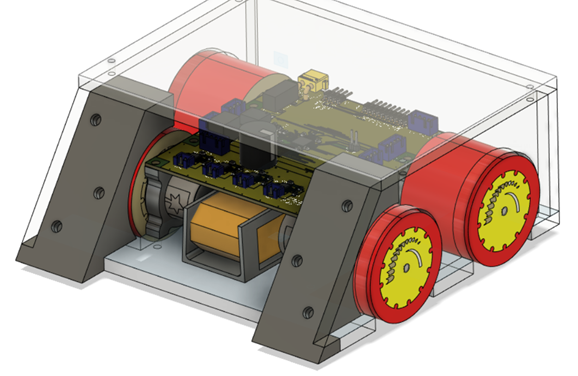
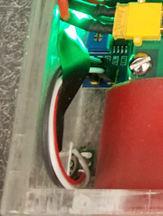
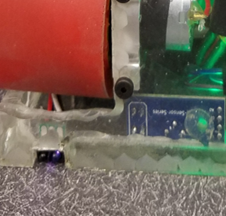
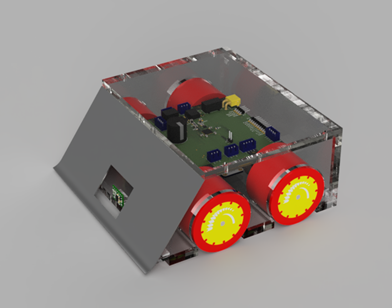
As the project progressed, three new components were created to address issues that arose with the mechanical design. As mentioned previously, the acrylic sidewalls split away from the baseplate due to a hard impact during testing. This was remedied with superglue and the addition of 3D printed components (as seen in Figure 2) which served to support the sidewalls and provide a more durable mounting solution for the dozer blade on the front of the robot. Concerns about potentially damaging the battery led us to 3D print a small battery holder which was epoxied to the baseplate of the frame and lined with foam. Finally, a small time-of-flight sensor mount was 3D printed and adhered to the back of the dozer blade rather than directly mounting the sensor to the baseplate of the frame. This provided a better vantage point for the sensor and kept it farther out of harm’s way during matches. With these small additions, the final mechanical design proved to be durable and effective during testing and the competition. The robot could be driven off the side of the dohyo and crashed into other robots without any further mechanical failures. The selected wheels and motors exceeded our performance expectations; they could push a wheeled office chair with a person in it across the lab, a test which other teams were unable to replicate using their own robots.