Mechatronics Portfolio
A digital portfolio showcasing my mechatronics projects and relevant engineering skills

My Background
I am a mechanical engineering undergraduate senior concentrating in mechatronics at Cal Poly (expected graduation December 2022). My primary career interests are robotics and mechatronics. In particular, I am interested in medical and agricultural robotics used in precise positioning and delicate material handling applications. My relevant skills include SolidWorks and Fusion 360 CAD and FEA, Fusion 360 (Eagle) PCB design, Python programming, C/C++ programming, MATLAB dynamic system modelling, failure modes and effects analysis, statics and strength of materials, and system dynamics. Additionally, I am a skilled technical writer and communicator; I diligently document my work and am adept at discussing technical aspects of a project within a design team. Aside from my personal engineering projects, I spend my free time hiking, camping, rock climbing, mountain biking, and cooking. I particularly enjoy baking sourdough bread using my naturally cultivated sourdough starter. I am also casually learning Spanish to build upon the basics I learned in high school, with the goal of becoming conversationally proficient by 2024.
Projects
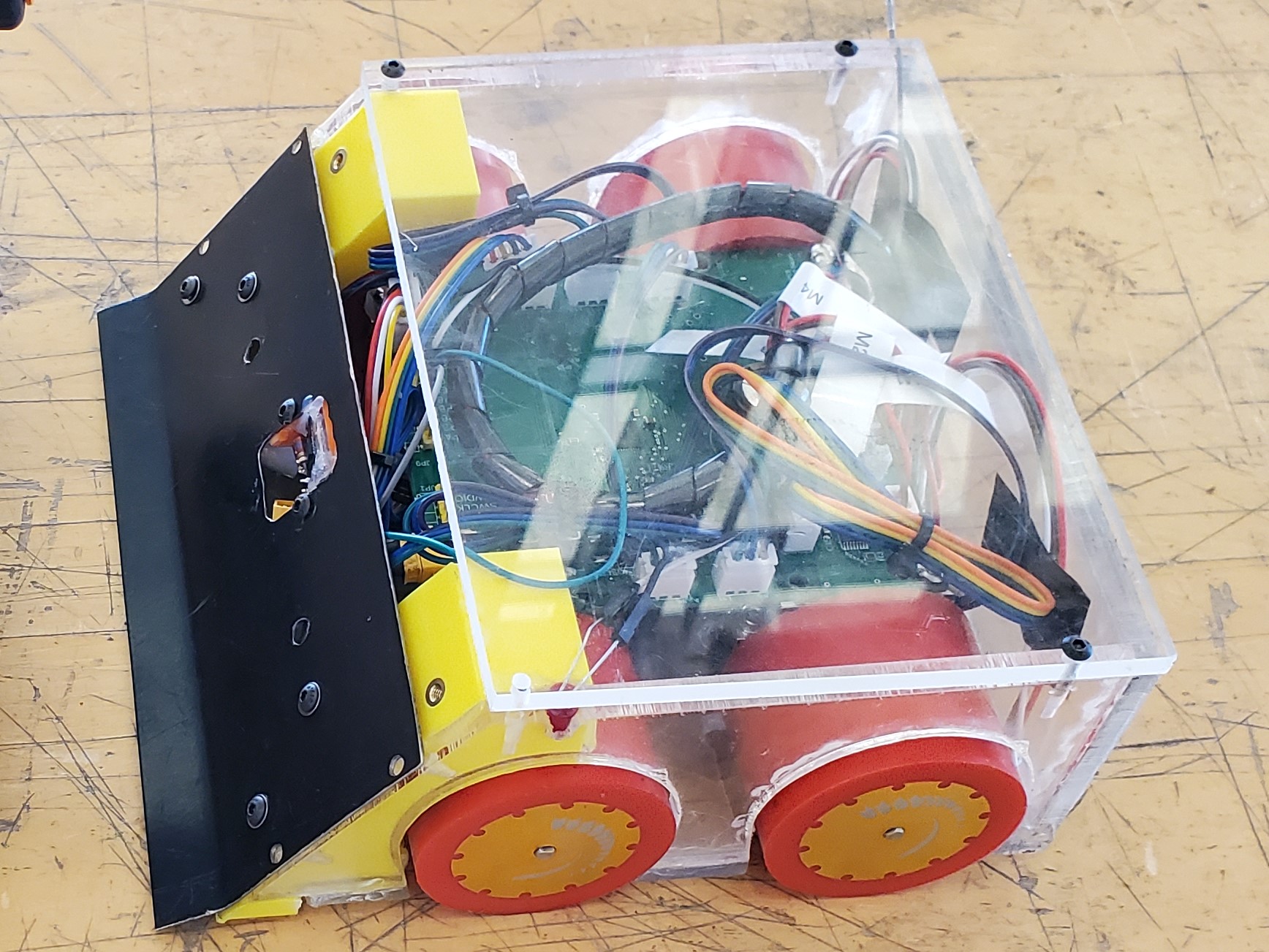
Sumo Robot Control System Design Competition
- Five teams of graduate students
- Eight week design cycle project
- Strictly rapid-prototype manufacturing techniques
- Design, build, and program a prototype sumo robot
- Custom PCB and electronics design
- Compete for the title of best control system
Results:
Successfully designed, built, programmed, tested, and documented a fully autonomous sumo robot. This prototype outperformed all four other robots entered in a tournament against ours.
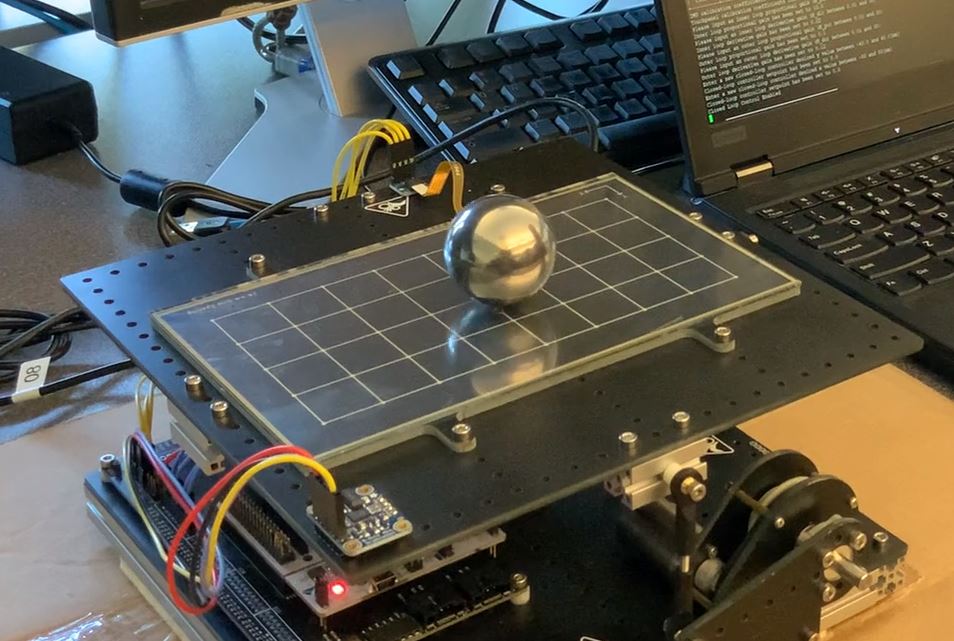
Ball Balancing Platform
Intro to Mechatronics class project
Learning objectives include:
- Understand high-level design of mechatronics systems
- Design software to meet real-time constraints
- Work effectively within a development team
- Manage team source code repository and project documentation website
Results:
Successfully implemented two-layer cascading PD control algorithm and tuned the system to effectively balance a steel ball.
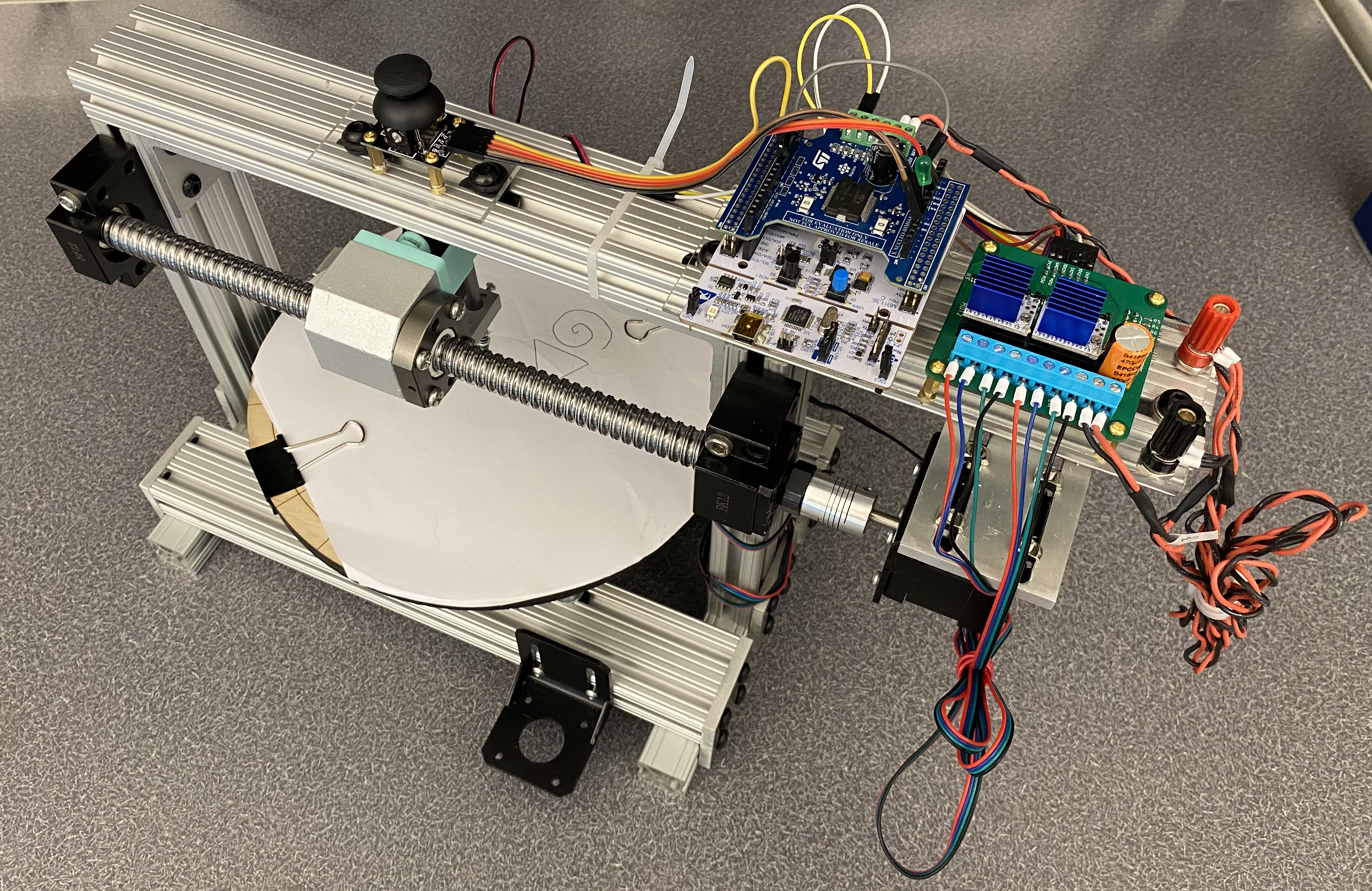
Polar Plotting Machine
Mechatronics class project
Learning objectives include:
- Perform high-level design of a mechatronics system
- Design complex programs using an organized methodology
- Utilize hardware documentation to inform your design process
- Document hardware and software designs thoroughly
Results:
Successfully designed, built, and programmed a robot capable of autonomously drawing images from Hewlett-Packard Graphics Language files.
Contact Logan
I expect to graduate in December 2022 and am currently seeking employment. Please feel free to contact me.
Email Call